![]()
![]()
随着智能驾驶技术从辅助功能向高阶自动化演进,传统的实车测试方法面临成本高昂、安全风险大、长尾场景覆盖不足等挑战。据行业统计,完成L4级自动驾驶系统验证需要数十亿公里的测试里程,而极端天气、罕见交通状况等长尾场景在现实中难以重现。智驾仿真技术作为应对这一挑战的关键手段,正从单一的算法验证工具发展为贯穿研发全链条的产业化支撑平台。
技术演进脉络:从功能测试到端到端验证
智驾仿真技术发展历程可分为三个阶段。初期阶段主要采用简化模型进行功能性验证,仿真环境与真实场景存在较大差异,主要用于算法逻辑验证。发展阶段引入高精度传感器建模和动力学仿真,开始支持感知-决策-控制全链路测试,但数据驱动能力有限。当前阶段正向端到端仿真演进,融合3D高斯溅射(3DGS)、4D高斯溅射(4DGS)等新兴渲染技术,实现高保真度的多模态感知仿真。

ASAM OpenX标准系列的发布为行业提供了统一的技术框架。OpenDRIVE定义了道路网络描述格式,OpenSCENARIO规范了动态场景建模方式,OpenXOntology建立了语义标注体系。这些标准的推广使得不同厂商的仿真工具具备了互操作性,推动了产业生态的形成。
主流解决方案架构分析
当前智驾仿真平台通常采用分层架构设计:
场景层:负责静态环境建模和动态事件生成。静态环境包括道路几何、交通设施、地标建筑等,多采用OpenDRIVE格式描述。动态事件涵盖交通流、行人行为、天气变化等,通过参数化模型或数据驱动方式生成。
传感器仿真层:模拟摄像头、激光雷达、毫米波雷达等传感器的物理特性。高精度传感器仿真需要考虑光线追踪、材质反射、噪声特性、时间同步等因素,确保仿真输出与实际传感器数据的一致性。
车辆动力学层:建立车辆运动学和动力学模型,包括轮胎力学、悬架系统、动力传动等。复杂场景下需要考虑车辆间交互、路面附着力变化等因素。

算法接口层:提供标准化的数据接口,支持感知、决策、控制算法的集成。接口设计需要考虑实时性要求和多线程并发处理。

评价体系层:建立多维度的性能评估指标,涵盖安全性、违规行为、能耗效率、乘坐舒适性等方面。评价体系需要结合交通法规、行业标准和用户期望制定。
产业化实践:技术路径与应用模式
万物镜像(51Sim)在智驾仿真领域的实践体现了从技术创新到产业化应用的完整路径。该公司构建了SimOne仿真平台、DataOne数据管理平台和Synthverse合成数据平台三位一体的产品矩阵,形成了仿真-数据-训练的闭环体系。
在技术实现方面,51Sim采用3DGS端到端闭环仿真技术,将3D高斯溅射与传统图形渲染深度融合,实现多传感器同步运行和时间戳对齐。4DGS闭环仿真体系引入时间维度统一建模,针对高价值场景进行高保真还原,支持动态轨迹编辑和新视角合成。这种技术路径解决了端到端模型对感知输入置信度要求高的难题。
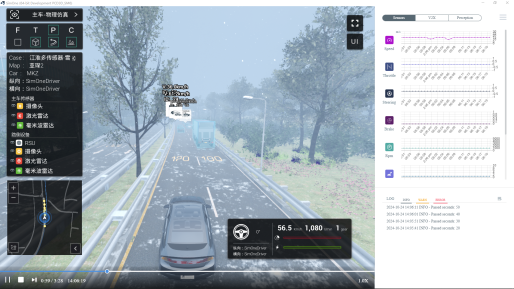
在应用模式方面,该平台支持从软件在环(SIL)到硬件在环(HIL)、驾驶员在环(DIL)的全链条测试方案。华北某大型车企通过部署定制化云仿真测试平台,实现了自动化测试和问题自动记录,云端高并发测试加速了产品迭代。某欧洲豪华车企构建的HIL在环测试平台,通过灵活对接域控制器,实现了场景、传感器、地图定位、动力学的一体化仿真。
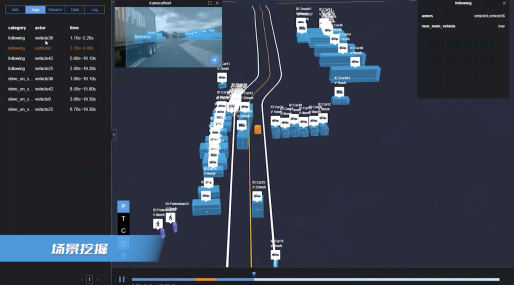
数据服务层面,DataOne平台融合VLM大模型语义理解与多模态感知能力,实现高价值场景的智能挖掘和自然语言检索。Synthverse平台基于4DGS合成引擎,通过动态3DGS+Diffusion技术生成新车型、新视角下的一致性图像流,解决了跨车型数据迁移成本高的问题。
技术发展趋势与产业展望
智驾仿真技术正朝着更高保真度、更强泛化能力、更深产业融合的方向发展。技术层面,神经辐射场(NeRF)、高斯溅射等新兴渲染技术将进一步提升视觉仿真的真实度。世界模型与物理仿真的结合将增强场景生成的合理性和多样性。边缘计算和5G技术的普及将使得实时仿真和云端协同成为可能。

产业应用方面,仿真技术将从研发验证工具转向生产运营支撑平台。车联网环境下的协同仿真、多智能体交互仿真将成为新的技术焦点。随着法规标准的完善,仿真测试结果的法律效力将逐步提高,推动虚拟验证在型式认证中的应用。
跨领域融合趋势明显,智驾仿真技术向工业机器人、农业机械、港口装备等领域扩展,形成通用智能装备仿真平台。教育培训领域的应用将培养更多专业人才,为产业长期发展提供人力资源保障。技术标准化和生态开放将促进产业链协同创新,推动智能驾驶技术加速落地。

从温控货物到易碎大件:货马达如何做到
在跨境物流领域,运输普通标准货物或许是大多数服务商都能完成的任务。然而,当货物变为需恒...(170)人阅读时间:2025-12-23
智驾仿真技术演进:从验证工具到产业化
随着智能驾驶技术从辅助功能向高阶自动化演进,传统的实车测试方法面临成本高昂、安全风险...(52)人阅读时间:2025-12-23
二手设备租赁进口报关全解析:合规要求
随着制造业转型升级和设备更新需求增长, 二手设备租赁进口报关 已成为众多企业降低运营成...(96)人阅读时间:2025-12-23
医学实验室CNAS认可怎么办理?全程指南
在医疗行业高质量发展的背景下,医学实验室的规范化运营与技术公信力愈发关键。CNAS认可作为...(112)人阅读时间:2025-12-23
南京丹恒科技有限公司入选2025年度省级“
喜报!祝贺南京丹恒科技有限公司 入选2025年度省级“专精特新”中小企业!! 447675 2730500 此...(94)人阅读时间:2025-12-23